GRIPS (Graz Robust and Intelligent Production System) ist ein Team von Studierenden der TU Graz welches an der Logistics League des RoboCups teilnimmt. Gegründet wurde das Team im Herbst 2015 im Zuge der Übung “Konstruktion Mobiler Roboter”. Studierende arbeiten dabei an einem praktischem Projekt mit Fokus auf Robotik.
Bereits im Jahr 2011 wurde die “Festo Logistics Competition” gegründet, welche sich mit Problemen der Industrie 4.0 beschäftigte. Ein prominentes Beispiel dafür ist die Erstellung eines Plans welcher verschiedene Tasks an eine Roboterflotte verteilt. Aus dieser Liga ging 2012 die RoboCup Logistics League (RCLL) hervor. Anfangs wurden dabei Pucks am Boden bewegt. Seit 2015 gibt es das heutige Format mit mehreren Mobile Production Systems (MPS). Ein Team besteht aus bis zu 3 Robotern und 7 dieser MPS. Mit diesen 10 Maschienen müssen diverse Produkte zusammengesetzt werden, die aus einer Basis, einer variierenden Anzahl an Ringen und einem Deckel bestehen. Dabei wird das Spielfeld und die zu Produkte vor jeder Runde zufällig neu generiert.
Da während der Covid19 Pandemie ein rein virtuelles Format gefunden werden musste, wurde neben dem Hauptspiel nun auch ein sogenannter Challenge Track eingeführt, bei dem Teams vereinfachte Probleme der RCLL lösen müssen, wie z.B Navigation, Exploration oder Interaktionen mit den MPS.
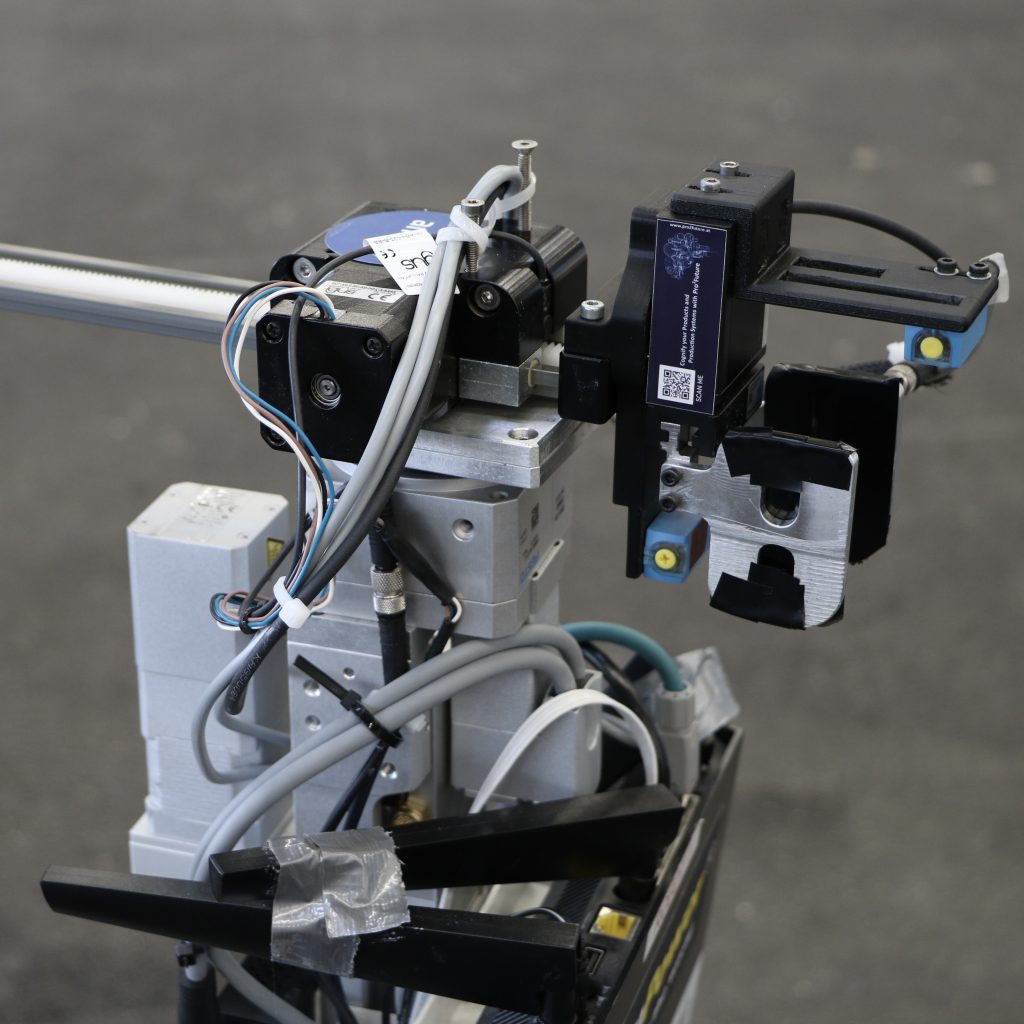
Um erfolgreich die gestellten Aufgaben zu erledigen, muss die Ausführung verschiedener Tasks beherrscht werden. Ein Beispiel dafür wäre ein Produkt bei einer MPS zu greifen, zu einer anderen Maschine zu navigieren und das Produkt dort wieder abzustellen. Auf dieser Ebene arbeitet GRIPS vor allem mit Komponenten aus dem Robot Operating System (ROS). Dieses bietet etwa Treiber für diverse Sensoren und unterschiedliche Planer für die Navigation. Derzeit wird noch ROS1 in der Version Noetic verwendet. Da für ROS1 nun schon bald aber kein Langzeitsupport mehr gewährleistet wird, arbeitet das Team bereits daran den bestehenden Software Stack auf ROS2 upzudaten und plant bis zum Frühjahr 2024 alle 3 Roboter auf den neuesten Stand zu bringen. Der Greifer wurde zusammen mit dem Institut für Fertigungstechnik im Zuge einer Bachelorarbeit entwickelt. Dabei kommt ein 3-Achsen Greifer mit 2 Distanzsensoren zum Einsatz. Ein Sensor ist dafür zuständig das Produkt zu erkennen und der Andere hat die Aufgabe das Förderband, welches als Abstellbereich genutzt wird, zu finden. Da es heuer knapp vor dem Wettbewerb einen Hardware defekt gab und die aktuell benutzten Sensoren in so kurzer Zeit nicht lieferbar waren, hat das Team mit verschiedenen anderen Sensoren experimentiert. Dabei gab es im Zuge des RoboCups viele Learnings wie sich unterschiedliche Sensoren im Bezug auf unterschiedliche Oberflächen verhalten.
Die Statemachine, welche direkt am Roboter läuft, wird mittels Behaviour Trees realisiert. Diese entscheiden z.B ob eine Aktion wiederholt wird, welche Tasks parallel ausgeführt werden und in welcher Reihenfolge dies passiert. Diese Technologie wird unter anderem auch in der Spieleentwicklung verwendet, um das komplexe Verhalten und die Entscheidungsfindung von NPCs zu modellieren.

Die einzelnen Roboter haben dabei keinen Überblick über das gesamte Spiel. Sie wissen nicht einmal welchem Team sie angehören. Während des Spiels werden den einzelnen Robotern von einer zentralen Flottensteuerung die einzelnen Tasks zugewiesen. Diese entscheidet welche Produkte produziert werden und welcher Roboter welche Aufgaben übernimmt. Dabei setzt GRIPS auf Temporal PDDL (Planning Domain Definition Language). Hier wurde über die Jahre eine Domain entwickelt, mit welcher es möglich ist, einen einzelnen Plan für die parallele Zusammensetzung mehrer Produkte zu finden. Aus diesem Plan wird ein Temporal Graph erstellt, über den die einzelnen Aktionen den Robotern zugewiesen werden.
Hier sieht das Team noch Ausbaufähigkeit, da es im Moment noch nicht möglich ist einen neuen Plan zu erstellen während sich ein vorheriger Plan noch in Ausführung befindet. Dies führt in der Praxis dazu, dass die Roboter ab und an bis zu 20 Sekunden still stehen, da sich die Flottensteuerung noch in einer neuen Planungsphase befindet und derweilen keine Aktionen vergeben kann. Dies passiert z.B nachdem eine Aktion fehlschlägt und ein neuer Plan gefunden werden muss. Eines der Ziele für den RoboCup 2024 ist es, nun diese Planungsfindung parallel zur Ausführung der Tasks zu realisieren.

Heuer wurden dafür auch erste Schritte mit Cloud Computing unternommen. GRIPS hat im Jahr 2022 dabei mitgearbeitet eine highlevel Simulation für die RCLL zu entwickeln. Im Moment wird noch jede Simulation manuell gestartet und ausgewertet. Da z.B für das Tuning der Planerparameter viele Spiele und Ergebnisse notwendig sind, wird im Moment fieberhaft an einer Simulationsumgebung, aufgebaut auf Kubernetes, gearbeitet. Das erklärte Ziel besteht darin bis zu 1000 Spiele pro Woche zu simulieren.

Nach einem sehr erfolgreichen Jahr 2023, in dem erstmals der RoboCup, die German Open und die OpenChallenge gewonnen werden konnte, ist die Stimmung im Team für das Jahr 2024 seht gut. Erklärtes Ziel ist es den ersten Platz zu verteidigen.